Robotassisterad kirurgi har senaste åren vunnit terräng, framför allt inom onkologisk urologi. Minimalinvasiv kirurgi, dit både laparoskopi och robotkirurgi räknas, reducerar operationstraumat med minskad postoperativ smärta, lindrigare tarmparalys, kortare rehabilitering och följaktligen kortare vårdtid och större patienttillfredsställelse [1].
Laparoskopisk kolorektal kirurgi är tekniskt krävande även för laparoskopiskt drivna kirurger [2, 3] vilket säkerligen bidragit till den relativt låga andelen av laparoskopiska koloningrepp, men framför allt rektala ingrepp, som utförs.
Dålig ergonomi, tremor, tvådimensionellt synfält, fixerade instrumenttoppar med enbart fyra frihetsgrader och instabil kamerabild är alla faktorer som minskar åtkomligheten och försvårar kirurgisk handläggning. Laparoskopisk operation av rektalcancer, med lilla bäckenets relativa trängsel samt kravet på total mesorektal excision i ett tidigare bestrålat fält, tydliggör än mer problematiken.
Robotteknologin har utformats för att övervinna dessa tillkortakommanden, och erbjuder bland annat en stabil operationsplattform med ett tredimensionellt synfält (3D), artikulerade instrument med sju frihetsgrader, skalning av handrörelser samt en god ergonomi [4, 5].
Kolorektal kirurgi har en lång tradition på Capio S:t Görans sjukhus. Sjukhusets NGI-sektion (nedre gastrointestinal) består i dag av sex kirurger; fyra överläkare, som alla är ackrediterade kolorektalkirurger, en biträdande överläkare och en specialistläkare. Årligen utförs i genomsnitt drygt 100 koloningrepp respektive 30 rektalingrepp. En betydande del opereras akut på grund av hotande ileus/subileus, blödning eller perforation. Ungefär var sjätte elektivt koloningrepp opereras med laparoskopisk teknik.
Sedan 2012 har NGI-sektionen med hjälp av en DaVinci-robot (Intuitive Surgical Systems, CA) utfört cancerkirurgi, där samma team med tre läkare och en specialiserad operationssjuksköterska ingått (Figur 1). Syftet har varit att se om tekniken kan erbjuda bättre operativa förutsättningar i en minimalinvasiv miljö med bevarad kvalitet och säkerhet.
Från 2012 fram till mars 2013 har tolv patienter opererats, varav tre hade sigmoideumcancer och nio hade rektal cancer. Alla patienter hade en cancersjukdom som verifierats genom provexcision (px). Patienterna informerades före operation om operationsförfarandet. Patienter med ASA-klass 4, T4-tumörer, säkerställd preoperativ spridning och tidigare extensiv öppen bukkirurgi exkluderades.Tio främre resektioner och två amputationer utfördes. Alla ingrepp innebar lösning av vänster flexur och delning av mesenterica inferior-kärlen. Alla patienter med tumör under 10 cm från anus avlastades med loop-ileostomi.
Operationstiderna låg mellan 213 och 674 minuter (median 469 och medel 450 minuter). En operation konverterades till öppen kirurgi. Två patienter fick stanna över natten för observation, en på grund av ett lindrigt subkutant emfysem, den andra på grund av låg kroppstemperatur. En patient låg två dagar på intensivvårdsavdelning på grund av oklart förvirringstillstånd som inte ledde till några sequelae.
En patient drabbades av en perineal sårinfektion som läkte spontant, medan en annan fick en tilltagande prolaps av sin sigmoideostomi tio dagar postoperativt. Denna patient reopererades elektivt.
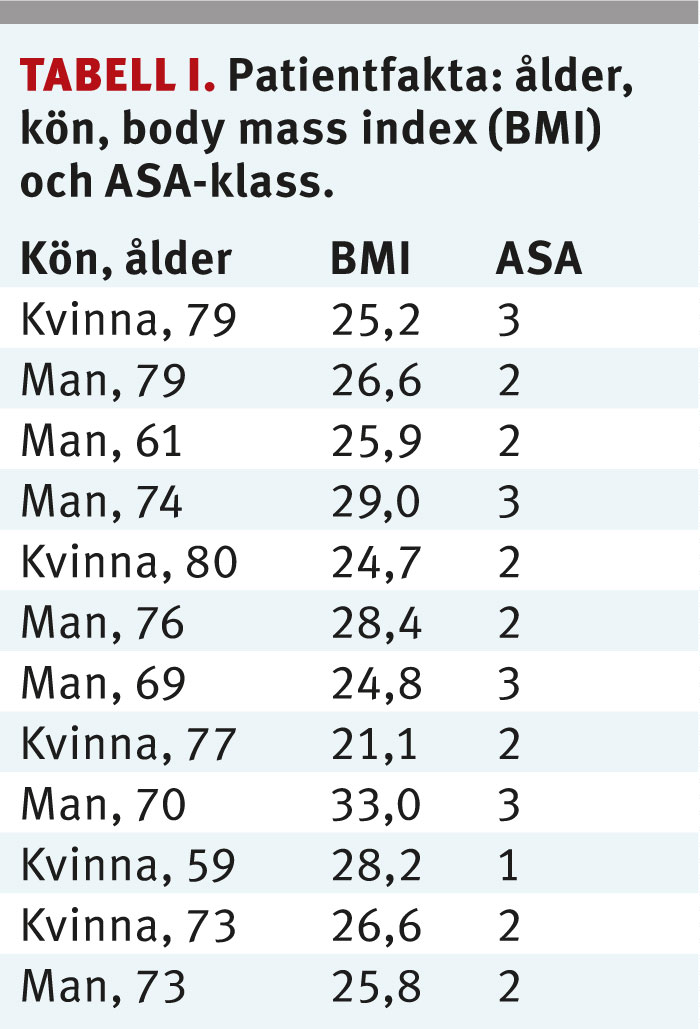
Patologisk-anatomisk diagnostik (PAD) visade att ingen av patienterna hade en positiv cirkumferentiell resektionsyta (CMR) eller en hotad distal marginal (HDM). Antalet lymfkörtlar i preparaten hade en spridning från 7 till 27 (median 12, medel 14,4). Alla patienter diskuterades på onkologkonferens, och fem erbjöds och fick postoperativ onkologisk behandling. Vårdtiderna låg på 3 till 14 dagar (median 7). För ytterligare patientfakta se Tabell I.
Frågan är vad roboten kan tillföra den befintliga laparoskopiska arsenalen?
För konsoloperatörens del innebär den en teknisk upplevelse som starkt påminner om den öppna konventionella kirurgin, men med en klart förbättrad ergonomi. Den operativa tillgängligheten lokalt är mycket bra, men helt beroende av rätt portsättning, och just denna upplevs som robotens svagare sida. Portarna är fixerade i robotarmarna och måste dockas om inför varje ny portsättning. Antalet robotarmar är begränsat, vilket ytterligare minskar flexibiliteten. Vår erfarenhet är att portsättning är ett moment som ska ägnas stor omsorg för att undvika kompromisser i ett senare skede av ett så pass komplext ingrepp som rektalcancer-kirurgi.
Den begränsade översikten över hela bukhålan upplevs också som ett minus medan den lokala sikten är superb. God kameraupplösning, fullständig avsaknad av handtremor och en finmotorik som överträffar den mänskliga handens ger möjlighet att urskilja och dissekera anatomiska strukturer långt ner i lilla bäckenet. Man kan således skapa optimala förutsättningar för ett precist kirurgiskt dissektionsarbete, vilket i ett längre perspektiv bör kunna återspeglas i en mer nervbevarande rektalcancerkirurgi än i dag.
Operationstiderna är långa men bör kunna kortas åtskilligt med ökande volymer. Operationstidens längd har dock inte påverkat patienternas postoperativa välmående. Vi har kunnat avstå från epidural anestesi och patienterna har fullt ut kunnat delta i vårt postoperativa rehabiliteringsprogram ERAS (enhanced recovery after surgery).
Våra initiala intryck är övervägande positiva och vi tror att robotkirurgin sannolikt är en framkomlig väg att med bevarad patientsäkerhet höja kvaliteten på den kolorektala laparoskopiska kirurgin.
Referenser
- Abraham NS, Young JM, Solomon MJ. Meta-analysis of short-term outcomes after laparoscopic resection for colorectal cancer. Br J Surg. 2004;91:11-24.
- Hartley JE, Mehigan BJ, Qureshi AE, et al. Total mesorectal excision: assessment of laparoscopic approach. Dis Colon Rectum. 2001;44:315-21.
- Poulin EC, Schlachta CM, Grégoire R, et al. Local recurrence and survival after laparoscopic mesorectal resection for rectal adenocarcinoma. Surg Endosc. 2002;16:989-95.
- Pigazzi A, Ellenhorn JD, Ballantyne GH et al. Robotic assisted laparoscopic low anterior resection with total mesorectal excision for rectal cancer. Surg Endosc. 2006;20:1521-5.
- D´Annibale A, Morpurgo E, Fiscon V, et al. Robotic and laparoscopic surgery for treatment of colorectal diseases. Dis Colon Rectum. 2004;47:2162-8.